top of page
Adaptive Cruise Control in Automobiles for Safe Driving Distance
PROJECT
This paper presents an architecture that is modelled to offer a ‘safe cruising’ capability for a robot by imploring MATLAB’s PID controller algorithm. A Simulink model for the robot’s DC motor is modelled by using the design specifications of the physical parameters of the motor. The different controllers of PID algorithm; P, I, PI, PD, and PID were used with a step input to achieve the desired design requirements stipulated for the system. This paper shows that, the PI controller offers the closest transient properties to the desired requirements. The physical system – dummy robot – demonstrates a robust execution of the realized characteristics determined from the PI controller.

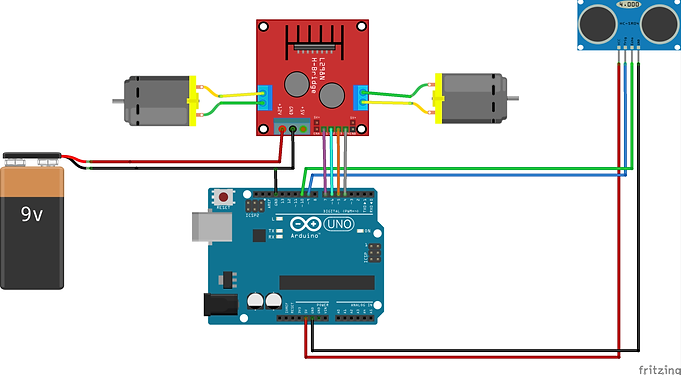
Circuit Schematic
bottom of page